

一、机械工时台班管理为何困难?
在建筑、矿山、物流等行业,机械工时台班管理是成本控制的核心环节。然而,许多企业发现这一管理过程充满挑战,主要原因包括以下几个方面:
1. 依赖人工记录,数据不准确且易造假
问题表现:
传统方式通常由现场人员手动填写机械使用记录,但受人为因素影响,数据往往不客观、不完整。
存在“人情班”或“吃空饷”现象,导致管理方无法掌握真实情况。
后果:
成本虚高:企业可能为无效工时(如机械待机、空转)支付额外费用。
决策失误:基于错误数据调整机械配置,可能导致资源浪费或短缺。
2. 难以区分“有效工时”与“无效工时”
问题表现 :
机械可能处于 “看起来在工作,实际效率低” 的状态,例如:
挖掘机铲斗动作极少,大部分时间在空转等待。
混凝土泵车因调度不合理,长时间怠速待命。
传统管理无法自动识别这些情况,导致 “机械在运转≠真正创造价值” 。
后果 :
效率低下:企业可能误以为机械利用率高,但实际上大量时间被浪费。
燃油与维护成本增加:空转和低效运行会加速机械磨损,并消耗更多燃油。
3. 缺乏实时监控,管理滞后
问题表现 :
大多数企业仅在每周或每月汇总机械使用数据,无法实时掌握每台设备的运行状态。
当发现某台机械长期闲置或低效时,问题可能已经持续数日甚至数周。
后果 :
调度优化困难:无法及时调整机械分配,导致部分设备过度使用,而另一些闲置。
项目进度风险:因机械管理不善,可能导致工期延误或额外成本。
二、机械指挥官如何提供机械工时台班科学监测?

1.多维度数据采集:让“看不见”的机械状态“透明化”
科学监测的基础是全面、真实、连续的数据输入。机械指挥官通过“硬件终端+传感器网络”实现对机械运行状态的多维度感知:
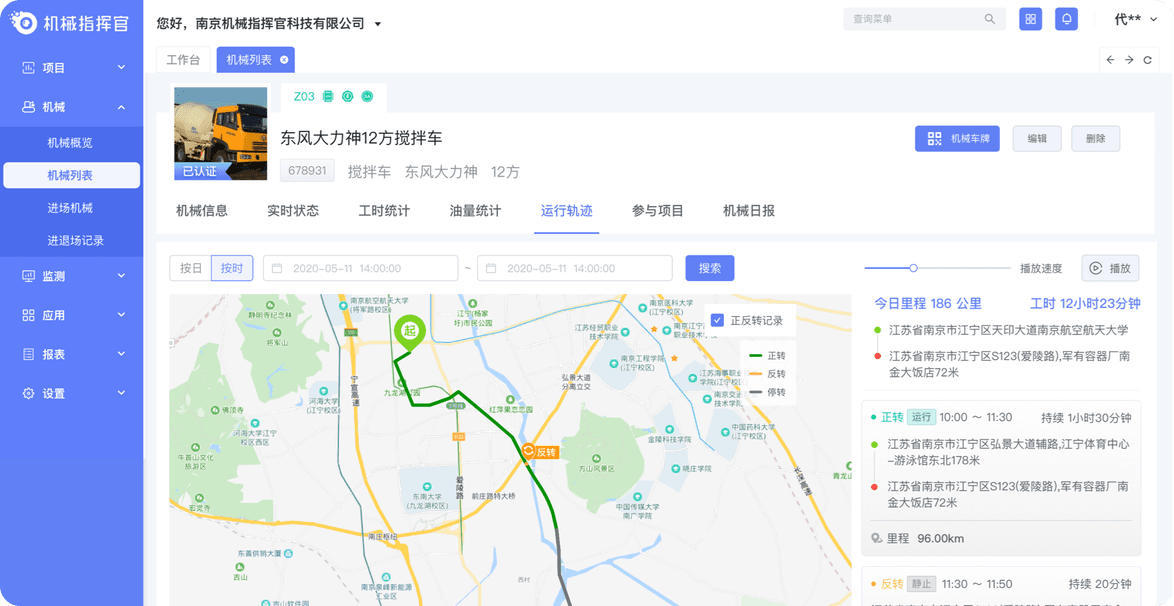
(1)基础定位与活动追踪:通过北斗定位模块实时获取机械的位置坐标,结合电子围栏技术,自动判断机械是否在指定作业区域内活动(例如防止设备私自离开工地)。
(2)运行状态感知:通过分析启停频率、作业动作的连续性等数据,区分“有效作业”、“低效运转”、“完全闲置”等不同状态。
2.AI智能分析:从“原始数据”到“管理洞见”的转化
单纯的数据堆砌无法直接指导管理决策,机械指挥官依托AI算法对采集到的多源数据进行深度解析,核心能力包括:
(1)有效工时精准识别:通过机器学习模型训练,系统可自动识别不同机械的“典型作业动作组合”。
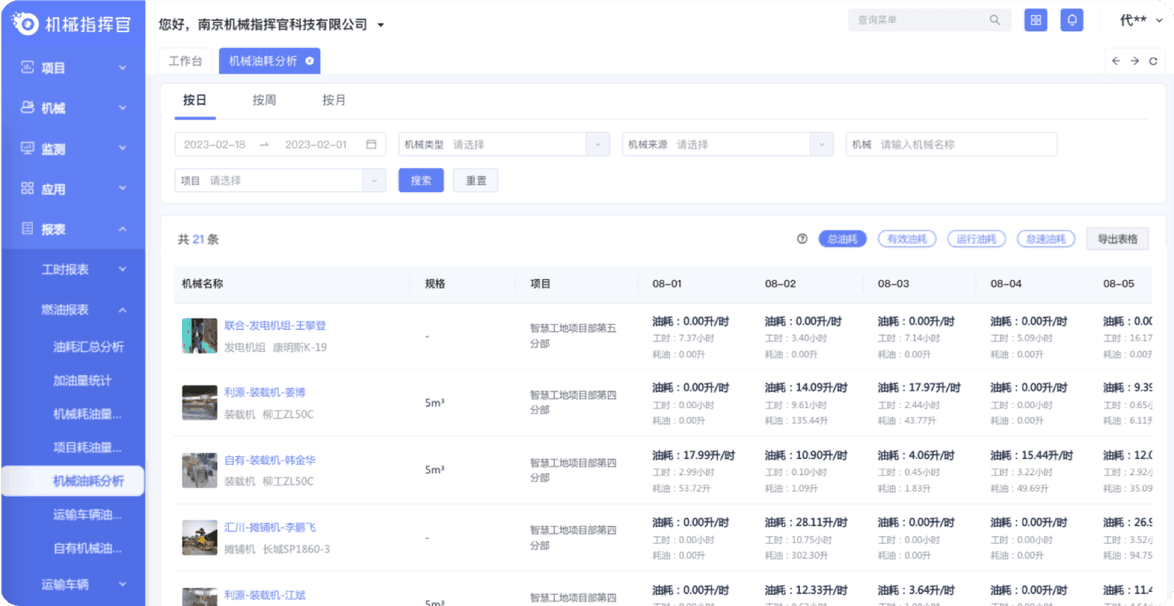
(2)效率对比与根因分析:自动计算单台机械的“有效工时占比”“单位时间能耗”“工时比”等KPI,并横向对比同类型设备的平均水平,快速定位“低效个体”。
3.可视化实时管理:让“数据”驱动“决策”
科学监测的最终目标是服务于管理优化,机械指挥官通过“后台系统+移动端小程序”提供多层级可视化界面,支持实时监控与动态干预:
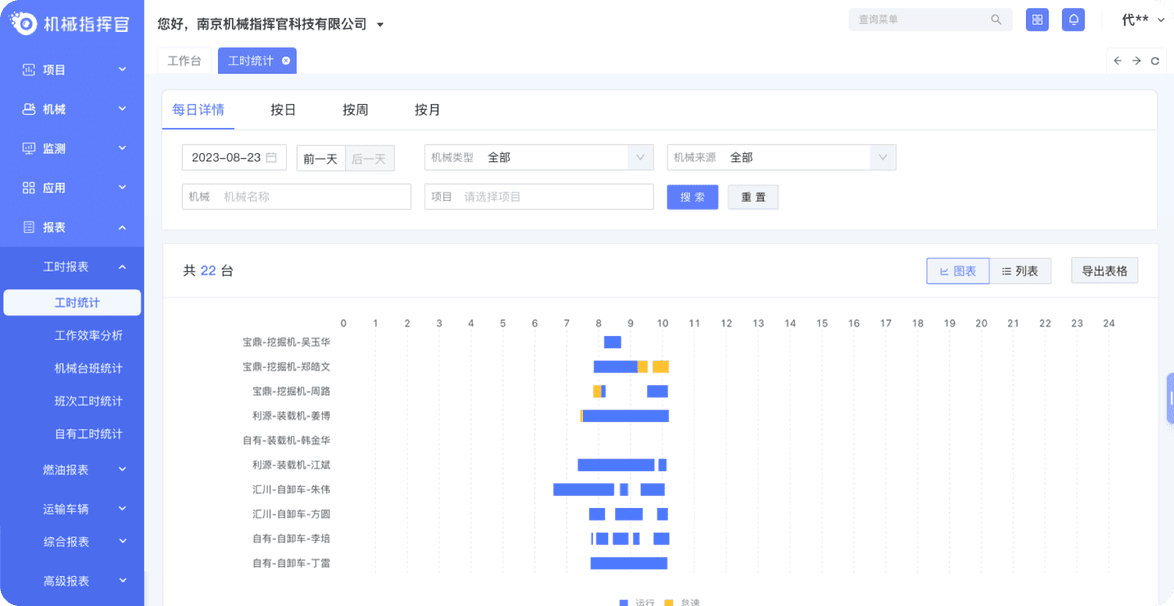
(1)单机维度:每台机械的实时状态(位置、当前状态)、当日/当班工时分解(运行/怠速/静止)、油耗曲线、历史效率趋势图。
(2)项目维度:全场机械的整体利用率排名、闲置设备清单、各工种机械的协同效率(如挖掘机与自卸车的配合作业匹配度)。
(3)预警与调度支持:当某台机械出现异常(如长时间怠速、油量异常消耗)或项目整体效率低于阈值时,系统自动推送预警信息至管理人员手机。
(4)管理价值:管理者无需依赖现场汇报,即可通过数据看板实时掌握全局,快速做出“调度优先级调整”“低效设备停用”“驾驶员操作规范提醒”等决策,真正实现从“经验驱动”到“数据驱动”的转变。
三、机械指挥官是工时台班管理的最优解
机械指挥官的科学监测并非单一技术的应用,而是通过“物联网采集-AI分析-可视化决策”的完整闭环,解决了传统管理中“数据不可靠、效率难量化、响应不及时”的痛点。它不仅让企业通过“技术工具+管理逻辑”的结合,“看清”每台机械的真实状态,将原本模糊的“工时台班管理”转化为可量化、可追溯、可优化的科学过程,更能通过数据驱动的管理优化,实现成本降低、效率提升与资源合理配置的目标。 数据的真实性、分析的智能性、应用的实时性三大维度,正是科学监测的核心价值所在。
- 更新时间:2025/09/25
- 更新时间:2025/09/24
- 更新时间:2025/09/23



完善信息,生成您的定制解决方案